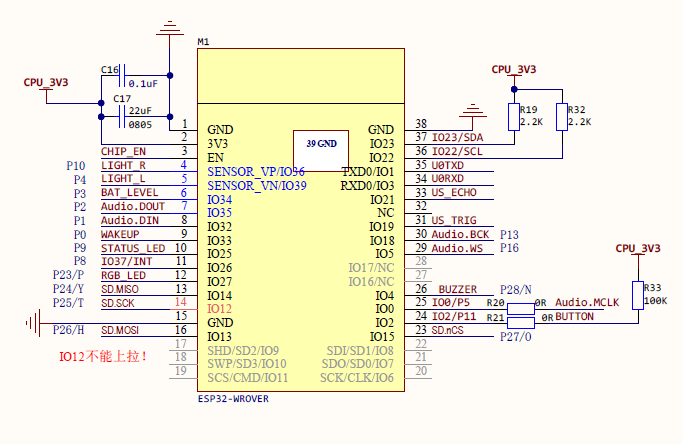
引脚功能排布¶
掌控桌面机器人使用esp32-wrover-b模块做为主控,引脚排布如图:
- i2c接口
- 机器人从控mcu,从控mcu控制步进电机、颜色传感器、防跌落传感器、循迹传感器。I2C地址:17。
- MPU6050 6轴传感器,I2C地址:104
- MMC5983MA地磁传感器,I2C地址:48
- codec芯片ES8388,i2c地址:16
- oled显示屏,I2C地址:60
- RGB LED,控制引脚:P23/IO27
- 顶部按键,控制引脚:P11/IO2
- 电池电量,探测引脚:P3/IO34
- 从机唤醒引脚:P0/IO33
- MPU6050,中断引脚:P8/IO26
- 蜂鸣器,控制引脚:P28/IO34
- 超声波,TRIG引脚:P14/IO19 ECHO引脚:P15/IO21
- 光线:左-控制引脚:P4/IO39 右-控制引脚:P10/IO36